Allocation
Le système d'exploitation, les processus systèmes et utilisateurs se trouvent dans la mémoire, il faut donc un mécanisme de protection pour isoler les processus. Ce mécanisme c'est le MMU vu plus tôt.
Mono-programmation
Lorsqu'un seul processus s'exécute à la fois en même temps que le système d'exploitation. C'est le cas sur les systèmes très rudimentaires comme MS-DOS.
Etant donné qu'il n'y a qu'un seul processus à la fois, le système d'exploitation n'a pas beaucoup à faire car il n'y a pas besoin d'isoler la mémoire (sauf pour la petite partie réservée au système d'exploitation).
Le BIOS rélise une gestion des périphériques.
Multi-programmation
Partitions fixes
On peut pré-découper la mémoire en morceaux de taille variable (les partitions). On va donc tenter de placer chaque processus dans la plus petite partition qui peut la contenir.
L'un des problème de ce système est qu'il va y avoir beaucoup de restes (fragmentation interne) car si un a besoin de 4 unité mais que la seul partition que l'on peut prendre en contient 8, on a 4 unités non-utilisées.
Partitions variables
On alloue l'espace selon les besoins des processus, on va créer des partitions en fonction des demandes faites par les processus.
Table de bits
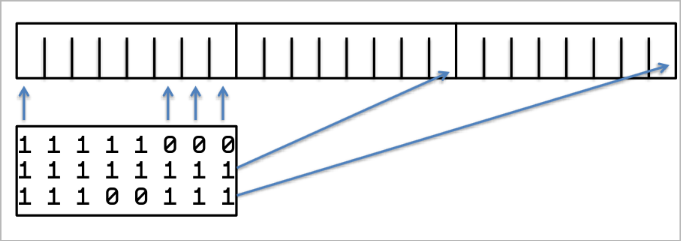
La table de bits correspond à une cartographie de la mémoire découpe en blocs d'allocations de taille fixe. Pour chaque bloc on va noter un 1 si c'est occupé, ou un 0 si le bloc est libre dans la table de bits.
Ainsi il suffit de seulement stoquer 1 bit par unité d'allocation. Cependant le problème est que si les unités d'allocations sont petits, alors il la table sera grande mais ce sera plus précis.
A l'inverse si les unités d'allocations sont grande, la table sera plus petite mais sera moins précise (ce qui implique donc un plus grand gaspillage de mémoire).
Un autre problème est que plus la taille est grande, moins l'allocation sera rapide car il faudra parcourir toute la table jusqu'a trouver le segment d'unités libre recherché.
Liste chainée
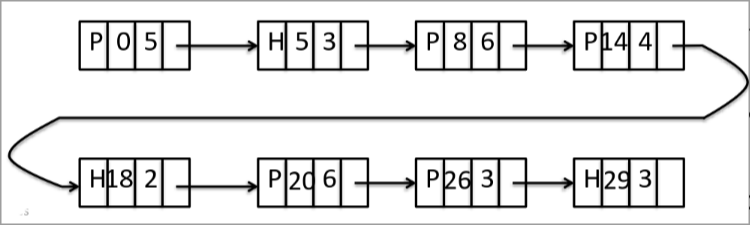
Une autre méthode correspond à conserver une liste chainée des partitions mémoire. Cette liste est généralement triée suivant les addresses des partitions libres, ainsi les partitions qui se suivent dans la mémoire se suivron dans la liste.
Chaque élément de la liste chainée n'a alors qu'a stoqué 4 informations
: si le bloc est libre ou pas, la position du début de la partition, la
longueur de la partition et le lien avec la partition suivante. Par
exemple P86 signifie qu'il y a un processus sur la partition en
position 8 d'une longueur de 6 unités.
Ce qui implique également de facilité la fusion de blocs libre, si un proramme libère une partition, cette partition pourra être facilement fusionnée avec les éventuelles partitoins libres adjacentes pour former une partition plus grande.
L'avantage est de rendre l'allocation beaucoup plus rapide, le désavantage est que cela crée de la fragmentation.
Pour en savoir plus, vous pouvez regarder sur ce site.
Choix de la partition
Lorsque l'on recherche la partition de mémoire qui pourra accueillir un programme, il y plusieurs algorithmes possibles.
- L'algorithme first-fit qui correspond à prendre la première partition libre trouvée étant suffisament grande pour contenir le programme. C'est souvent cette algorithme qui est utilisé car il est très rapide.
- L'algorithme best-fit qui correspond à parcourir toute la mémoire à la recherche de la meilleure partition. Cependant cette méthode est assez peu efficace et crée beaucoup de fragmentation externe en créant des bouts de partitions trop petites pour être utilisées
- L'algorithme worst-fit qui correspond à de nouveau parcourir toute la mémoire mais cette fois-ci à la recherche de la plus grande zone disponible afin d'éviter de créer trop de fragmentation externe comme le best-fit. Cet algorithme est particulièrement rapide pour les listes triées par taille.
Fragmentations
- La fragmentation interne survient lorsque la mémoire est divisée en unité d'allocation de taille fixe. Elle provient de la mémoire allouée par le SE mais pas demandée au processus. Le SE alloue donc un surplus de mémoire par rapport à la demande du processus.
- La fragmentation externe survient suite aux allocations et libérations successives, la mémoire ressemble donc à un gruyère.
Solutions à la fragmentation
Pour rassembler les zones mémoires et résoudre ce problème de fragmentation, on peut utiliser le compactage. Cela consiste à rassembler les zones mémoires occupées et les zones libres ensembles de façon à créer de grands espaces libres.
Cela est cependant uniquement possible dans le cas de la translation à l'exécution et c'est un mécanisme assez couteux en ressource.
Une autre solution est d'utiliser de la pagination que nous allons voir en détail dans la section suivante.
Swapping
Pour pouvoir s'exécuter un processus doit se trouver entièrement en mémoire, alors lorsqu'il y a beaucoup de processus en mémoire et peu de mémoire disponible on peut mettre un processus qui ne s'exécute pas (état ready) sur le disque dur pour libérer de la mémoire (via une partition sur le disque dur ou via un fichier "swapfile").
On dit alors que le processus est swappé. Un processus peut être swappé lorsque son quantum de temps a expiré (retour de running à ready), si le quantum est petit il y aura beaucoup de changmeent de processus et donc beaucoup d'accès au disque en revanche si le quantum est grand, il y aura moins de changments de processus et moins d'accès au disque.
Les performance de ce méchanisme sont donc déterminée par le temps de transfert mémoire <-> disque.
On ne peut swap que les processus auquel on a pas besoin d'accéder à la mémoire, c'est à dire les processus en état ready car pour les processus en état waiting, le système d'exploitation doit pouvoir accéder à la mémoire du processus pour y faire les entrées-sorties.