Synchronisation
Lorsque plusieurs processus coopèrent, ils doivent souvent intéragir entre eux, ils doivent parfois attendre qu'une opération soit effectuée par un autre processus pour travailler.
Il faut donc avoir des mécanismes qui permettent d'envoyer des événements aux processus (un processus doit pouvoir attendre l'évènement).
Types de synchronisation
Sous UNIX, les mécanismes suivants sont mis en oeuvre pour la synchronisation :
- Les signaux
- Les sémaphores
On parlera de point de synchronisation lorsqu'un processus attend un autre.
Les signaux
Un signal est un événement capturé par un processus, c'est aussi un mécanisme simple utilisé par le système d'exploitation pour signaler aux processus une erreur (SIGILL, SIGFPE, SIGUSR1, SIGUSR2, etc).
Exemple
Voici par exemple un programme dont la fonction sighandler est
appellée lorsque le signal SIGUSR1 est déclenché :
#include <stdio.h>
#include <signal.h>
#include <unistd.h>
#include <stdlib.h>
void sighandler(int signum);
/*
Ce programme va lier la fonction sighandler au signal SIGUSR1
Ce qui signifie que lorsque l'on lance le programme (qui contient une boucle infinie), lorsque l'on lance le signal via "pkill -SIGUSR1 a.out" (par exemple)
La fonction sighandler va être appellée et "SIGUSR1 reçu" va donc s'afficher à l'écran.
*/
int main(void) {
/* Si on remplace ici SIGUSR1 par SIGINT et que l'on fait CTRL+C, on va appeller la commande sighandler */
if(signal(SIGUSR1, sighandler) == SIG_ERR) {
printf("Erreur sur la gestion du signal\n");
exit(-1);
}
while(1) {
sleep(1);
printf("Hello\n");
}
return EXIT_SUCCESS;
}
void sighandler(int signum) {
printf("SIGUSR1 reçu\n");
}
Opérations
Il existe plusieurs opérations différentes sur les signaux :
-
signaletsigsetqui lient un signal à une fonction.signalla lie une seule fois, tandis quesigsetla lie continuellement. -
alarmdéclenche le signal SIGALARM au processus courrant. -
pausesuspend le processus jusqu'a la réception d'un signal -
killenvoie un certain signal au processus dont le PID est donné.
Les sémaphores
Un sémaphore est une variable entière en mémoire qui excepté pour son
initialisation est accédée uniquement au moyen de fonction atomiques
(ne pouvant pas être décomposée) p() et v().
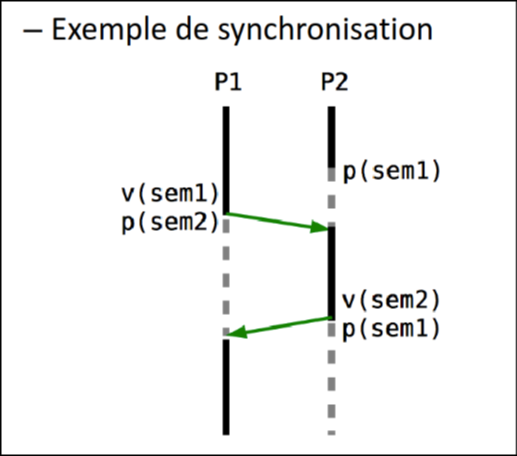
La fonction p(sem) va vérifier que la valeur est plus grande que zero,
si c'est le cas, la variable est décrementée et l'exécution continue, si
ce n'est pas le cas, alors il attend que ce soit le cas.
La fonction v(sem) va simplement incrémenter la variable de 1, et va
ainsi réveiller tous les processus qui attendrait ce sémaphore.
Ces foncitons ne sont pas présente dans C de base il faut importer les
fichiers semadd.h et semadd.c depuis l'espace de cours.
Exemple
Voici un exemple d'un programme qui communique avec un processus fils
via 2 sémaphores. Il est intéressant de noter que généralement un
processus ne va faire qu'une seule opération par sémaphore (par exemple
que des p() sur sem1 et que des v() sur sem2 ou inversément)
#include <stdio.h>
#include <unistd.h>
#include <stdlib.h>
#include "semadd.h"
#define SEM1 12345
#define SEM2 23456
/*
Ce programme va créer 2 sémaphores et 2 processus (un père et un fils).
Le fils et le père vont tous les deux exécuter une boucle sauf qu'a chaque itération ils vont s'attendre l'un l'autre.
Ainsi le père attends le sémaphore du fils (sem2) qui est émit lorsque le fils a fini son itération
De même le fils va ensuite attendre le sémaphore du père (sem1) qui est émit lorsque le père a fini son itération
Si on exécute ipcs -s lors de l'exécution du programme, on peut voir la liste des sémaphores créés.
Contrairement aux signaux, on peut créer nos propres sémaphores tandis que les signaux eux sont défini par le système d'exploitation.
*/
int main(void) {
int sem1, sem2, i;
/* Création des sémaphores */
sem1=sem_transf(SEM1);
sem2=sem_transf(SEM2);
/* Création des deux processus */
switch(fork()) {
case -1:
printf("Erreur fork()\n");
exit(-1);
/* Boucle du fils */
case 0:
printf("Je suis le fils %d\n", getpid());
for(i=0;i<5;++i) {
printf("[FILS] Valeur de i : %d\n",i);
sleep(5);
v(sem2); /* Envois du sémaphore (2) au père */
p(sem1); /* Attente du sémaphore (1) du père */
}
/* Boucle du père */
default:
for(i=0;i<5;++i) {
p(sem2); /* Attente du sémaphore (2) du fils */
printf("[PERE] Je suis le père\n");
sleep(5);
v(sem1); /* Envois du sémaphore (1) au fils */
}
}
return EXIT_SUCCESS;
}
Semget - Allocation de sémaphores
L'allocation se fait via int semget(int key, int nb, int flag), où
- La valeur retournée est un descripteur "semid"
- La clé est la valuer qui identifie le sémaphore
- Les flags définissent les permissions, comme pour les mémoires
partagées
IPC_CREATpermet de demander la création des sémaphores
On peut aussi simplifier l'allocation à partir d'une clé en utilisant
int sem_transf(int key), cette fonction n'est pas officielle mais
le fichier est disponible sur HELMo Learn.
Semctl - Gestion de sémaphores
On peut gérer les sémaphores (nottament pour libérer la mémoire) en
utilisant int semctl(int semid, int semnum, int cmd, union semun attr)
où
- semid est le descripteur du sémaphore
- semnum identifie le sémaphore (généralement c'est 0 si il n'y en a qu'un)
- cmd identifie la commande (IPCSET, GETVAL, SETVAL, IPCRMID ou IPCSTAT).
-
union semun attrest une "union" (un type de structure où chaqun des éléments partagent la même zone mémoire, ainsi ce ne peut être qu'un seul élément à la fois, un peu comme une enum en Rust). Il faut généralement définir cette structure soi-même en revanche.
Semop - Faire les opérations sur les sémaphores
int semop(int semid, struct sembuf* sops, unsigned nsops) est la
fonction qui est derrière les fonctions p() et v().
- semid est le descripteur du sémaphore
- sops est un tableau de structures semfus (contenant l'opération)
- nsops est le nombre d'éléménts du tableau sops
Section critique
C'est bien beau la synchronisation sauf que la coopération entre
plusieurs processus pose également des problème si deux processus
concurrents souhaite modifier les même données au même moment.
Définition section critique
On peut donc mettre en place une section critique, c'est un ensemble
d'instructions qui devraient être exécutées du début à la fin sans
interruption.
Une section critique est indispensable lorsque l'on traite des données
partagée afin qu'elle soit protégée et que ces données partagées ne
deviennent pas incohérente.
Par exemple, si on fait par exemple une liste chainée, elle risque de ne
plus être cohérente après plusieurs modifications.
On ne peut cependant pas empêcher la concurrence entre les processus.
Pour cela on va mettre en place des protections avant toute modification
pour s'assurer qu'un autre processus n'est pas déjà en train de modifier
la zone partagée.
Variable partagée
Celle ci consiste à partager une variable entre plusieurs processus, qui
est initiallement définie à 0. Avant d'entrer dans le processus, on
boucle sur la valeur de cette variable.
Si la variable est différente de 0 on boucle (et on attends). Ensuite on
place la variable à 1 avant de commencer la section critique puis on la
remet à 0 une fois que cela est fini.
while (i != 0);
i = 1;
/* Section critique ici */
i = 0;
Problème
Un gros problème peut survenir si un processus reviens dans l'état ready
(par exemple avec la fin de son quantum de temps) entre l'instruction
while et l'instruction de i = 1.
Ainsi l'autre processus peut lui aussi entrer en section critique et
peut lui aussi avoir son quantum de temps qui expire durant celui ci.
Ainsi on peut donc arriver dans une situation ou plusieurs processus
sont dans une section critique en même temps (ce qui est justement la
chose à éviter).
Ainsi, cette méthode de protection n'est pas fiable.
En plus de cela, utiliser une boucle while comme ceci consomme
inutilement du CPU.
Pour plus d'infomration voir la vidéo de laséance 3 du cours d'OS 2020à 2:25:50.
Par alternance
La protection par alternance consiste de manière similaire à la méthode
précédente à avoir une variable partagée mais ou chaque processus
attends une valeur différente.
Ainsi, par exemple un programme 1 pourrait avoir le code suivant :
while (tour != 0);
/* Section critique ici */
tour = 1;
Et un programme 2 pourrait avoir le code suivant :
while (tour != 1);
/* Section critique ici */
tour = 0;
Ainsi lorsque tour est à 0, le programme 1 peut exécuter sa section
critique, une fois qu'elle a fini le programme 2 peut exécuter la
sienne, et une fois que le progrmame 2 à fini, le programme 1 peut
recommencer.
Problèmes
Cette méthode de protection est fiable, contrairement à la précédente.
Cependant elle souffre tout de même d'assez gros problèmes…
Premièrement, elle est assez difficile à gérer, surtout si il y a plus
de deux processus à synchroniser.
Et deuximèment, comme la précédente, elle est assez peu efficace car
utiliser une boucle while ainsi consomme inutilement du CPU.
Pour plus d'infomration voir la vidéo de laséance 3 du cours d'OS 2020à 2:33:20.
Par fichier
La protection par fichier consiste à ouvrir et créer un fichier (appellé
"lock file") en mode exclusif (c'est à dire qu'un seul processus peut
accéder au fichier à la fois) pour annoncer que la section critique
commence.
Puis enfin à supprimer le fichier une fois que la section critique est
terminée.
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
#include <stdlib.h>
#define FIN_SECTION_CRITIQUE 1
#define DEBUT_SECTION_CRITIQUE -1
int quid(int op, char* nom, int essais) {
int i;
/*
* Quand on débute la section critique, on crée un fichier dit "lock file" en mode exclusif,
* si cela n'est pas possible c'est qu'une section critique est déjà en cours
*/
if(op == DEBUT_SECTION_CRITIQUE) {
for(i=0;i<essais;++i) {
/* Tenter d'écrire un fichier en mode exclusif (un seul processus a accès au fichier à la fois) et renvoyer 0 en cas de succès */
if(open(nom,O_WRONLY|O_CREAT|O_EXCL) >=0) {
return 0;
}
/* Si cela n'a pas fonctionné, réessayer dans une seconde */
else if(i<essais) {
sleep(1);
}
}
}
/*
* A la fin d'une section critique on supprime le lock file
*/
if(op == FIN_SECTION_CRITIQUE) {
/* Suppression du fichier et retourne 0 en cas de succès */
if(unlink(nom) == 0) {
return 0;
}
}
/* Retourne -1 en cas d'erreur ou dans le cas où tous les essais ont échoués */
return -1;
}
int main(void) {
printf("Attente section critique\n");
quid(DEBUT_SECTION_CRITIQUE, "program.lock", 5);
/* Section critique ici */
printf("Début section critique\n");
sleep(5);
printf("Fin section critique\n");
quid(FIN_SECTION_CRITIQUE, "program.lock", 5);
return EXIT_SUCCESS;
}
Problèmes
Cette solution est tout à fait fonctionnelle et fiable, cependant le
fait de devoir gérer un fichier peut rendre les choses un peu
compliquée, de plus cela ralenti les choses. Car pour chaque accès au
fichier, le processus devra passer en état waiting, puis ready,
puis de nouveau running.
Pour plus d'infomration voir la vidéo de laséance 3 du cours d'OS 2020à 2:37:50.
Synchronisation hardware
La synchronisation hardware consiste à utiliser des instructions
assembleurs pour protéger une section critique.
Voici un pseudo-code de démonstration :
boolean TestAndSet (boolean target) {
/* On copie la valeur de target */
boolean rv = target;
/* On met target à true */
target = true;
/* On retourne la copie de la valeur initiale */
return rv;
}
Ainsi pour l'utiliser il suffirait de faire ceci :
/* On attends que le lock (variable partagée initialement à false) soit mis à false pour continuer */
while (TestAndSet(lock));
/* Section critique ici */
/* On met le lock à false une fois terminé */
lock = false;
Ainsi lorsque lock est à false, TestAndSet va la mettre à true et
retourner false ce qui va donc faire passer la boucle et entrer en
section critique. Une fois cette dernière terminée, le lock retourne à
false.
En revanche si lock est à true, TestAndSet va retourner true et par
conséquent rester dans le while, en attente jusqu'a ce que la variable
soit à false.
Problèmes
Cette méthode est fiable mais le problème avec celle ci c'est
l'utilisation du while qui va une fois de plus consomer du CPU pour
simplement attendre.
Il est toute fois bon de noter que cette méthode est utilisée par le
système d'exploitation pour gérer d'autes systèmes de protection tel que
les sémaphores.
Pour plus d'infomration voir la vidéo de laséance 3 du cours d'OS 2020à 2:47:00.
Sémaphore
Les sémaphores permettent de
très simplement protéger une section critique, voici un exemple :
#include "semadd.h"
#include "sys/sem.h"
#include <stdio.h>
#include <unistd.h>
#include <stdlib.h>
#include <sys/wait.h>
#define KEY_SEM1 12345
#define KEY_SEM2 12346
int main(void) {
int sem1, sem2;
/* On crée 2 sémaphores */
sem1 = sem_transf(KEY_SEM1);
sem2 = sem_transf(KEY_SEM2);
/* On crée un nouveau processus */
switch (fork()) {
case -1:
printf("Quelque chose s'est mal passé lors de la création du processus...\n");
return EXIT_FAILURE;
/* Pour le fils */
case 0:
/* Attente du père */
printf("En attente du père\n");
p(sem1);
/* Section critique */
printf("Section critique du fils commence\n");
sleep(3);
/* Annonce au père qu'il a fini */
printf("Section critique du fils se termine\n");
v(sem2);
break;
/* Pour le père */
default:
/* Section critique */
printf("Début de la section critique du père\n");
sleep(3);
/* Annonce au fils qu'il a fini */
printf("Fin de la section critique du père\n");
v(sem1);
/* Attends le fils avant de supprimer les sémaphores */
p(sem2);
semctl(sem1, IPC_RMID, 0);
semctl(sem2, IPC_RMID, 0);
}
return EXIT_SUCCESS;
}
Comme vu précédemment, les p et v des sémaphores sont des actions
unitaires, il n'y a donc pas de risque que le processus soit arreter au
millieu. L'utilisation des sémaphores est la manière recommandée de
gérer des sections critiques.